이 블로그에서는 Simcenter Amesim에서 제공하는 라이브러리 중 하나인 3D 기계 라이브러리의 조인트를 설정하는 방법을 살펴보겠습니다.
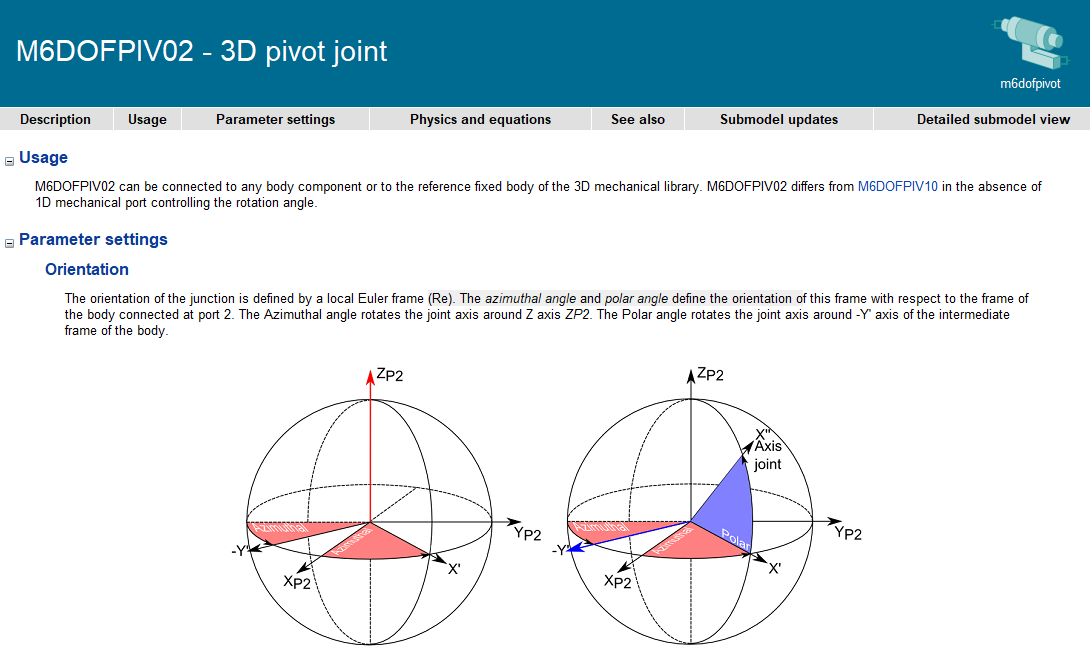
라이브러리 문서에는 Pivot Junction의 방향이 Azimuthal Angle 및 Ploar Angle로 정의되어 있다고 합니다.
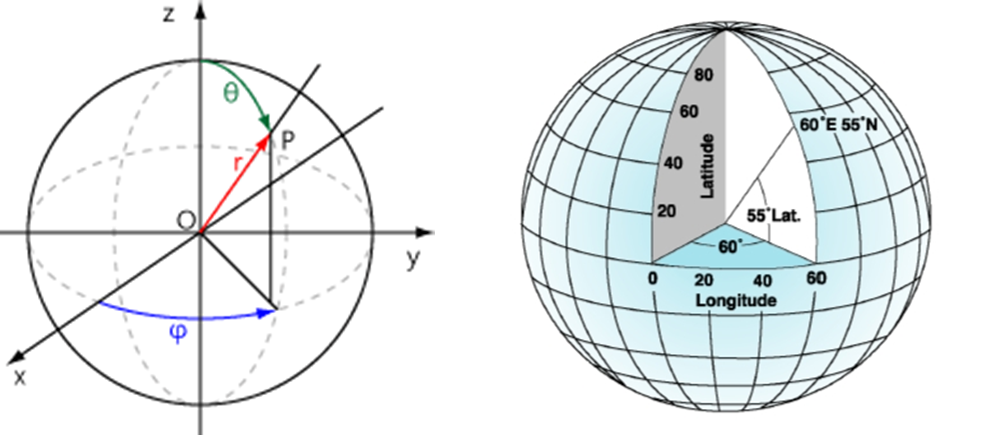
Azimuthal Angle과 Ploar Angle은 3차원 공간에서 점(P)을 정의하는 방법 중 하나인 구면 좌표계와 유사한 개념입니다. (구면 좌표계에 대한 자세한 내용은 아래 링크 참조)
구형 좌표계 – Wikipedia, 무료 온라인 백과사전
무료 백과사전 Wikipedia. 구면 좌표계는 3차원 공간에서 점을 나타내는 좌표계로 보통 ( r , ϕ , θ ) {\displaystyle (r,\phi ,\theta )}
ko.wikipedia.org
여기서, 관절의 자세를 정의하기 위해서는 방향만 정의하면 되므로 구좌표계에서 OP의 거리(r)는 정의할 필요가 없다.
위의 내용을 바탕으로 아래 예제를 통해 Amesim에서 Pivot Junction Orientation이 어떻게 적용되는지 살펴보자.
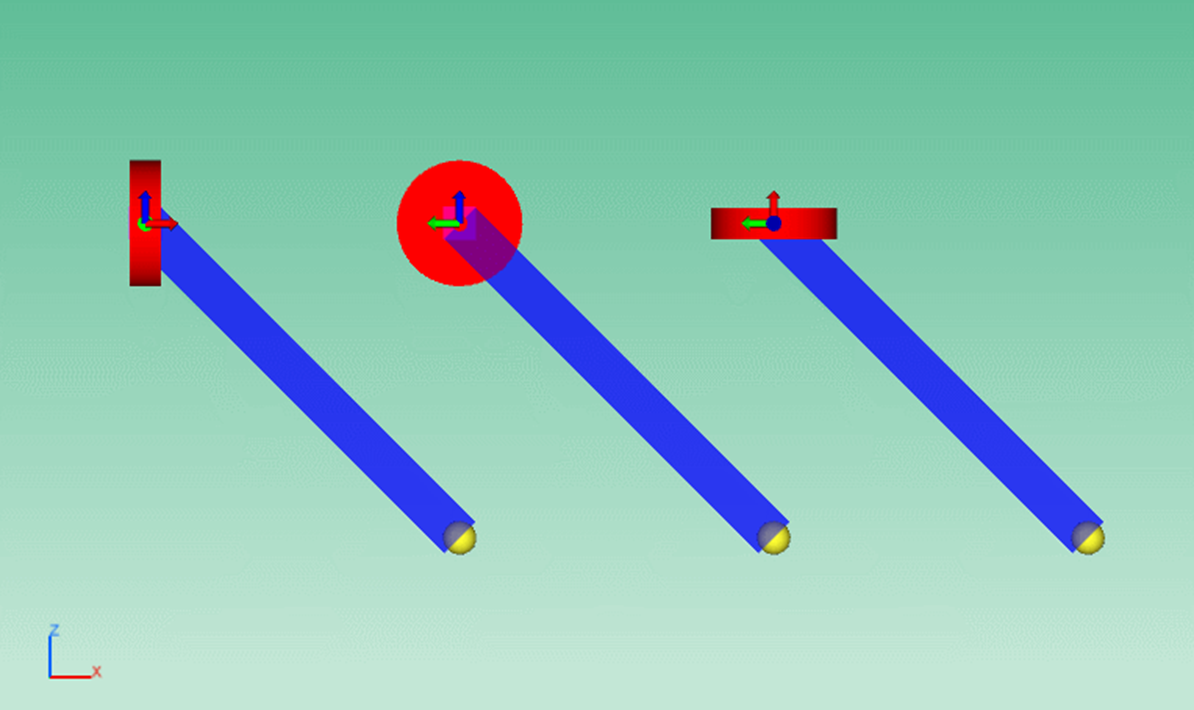
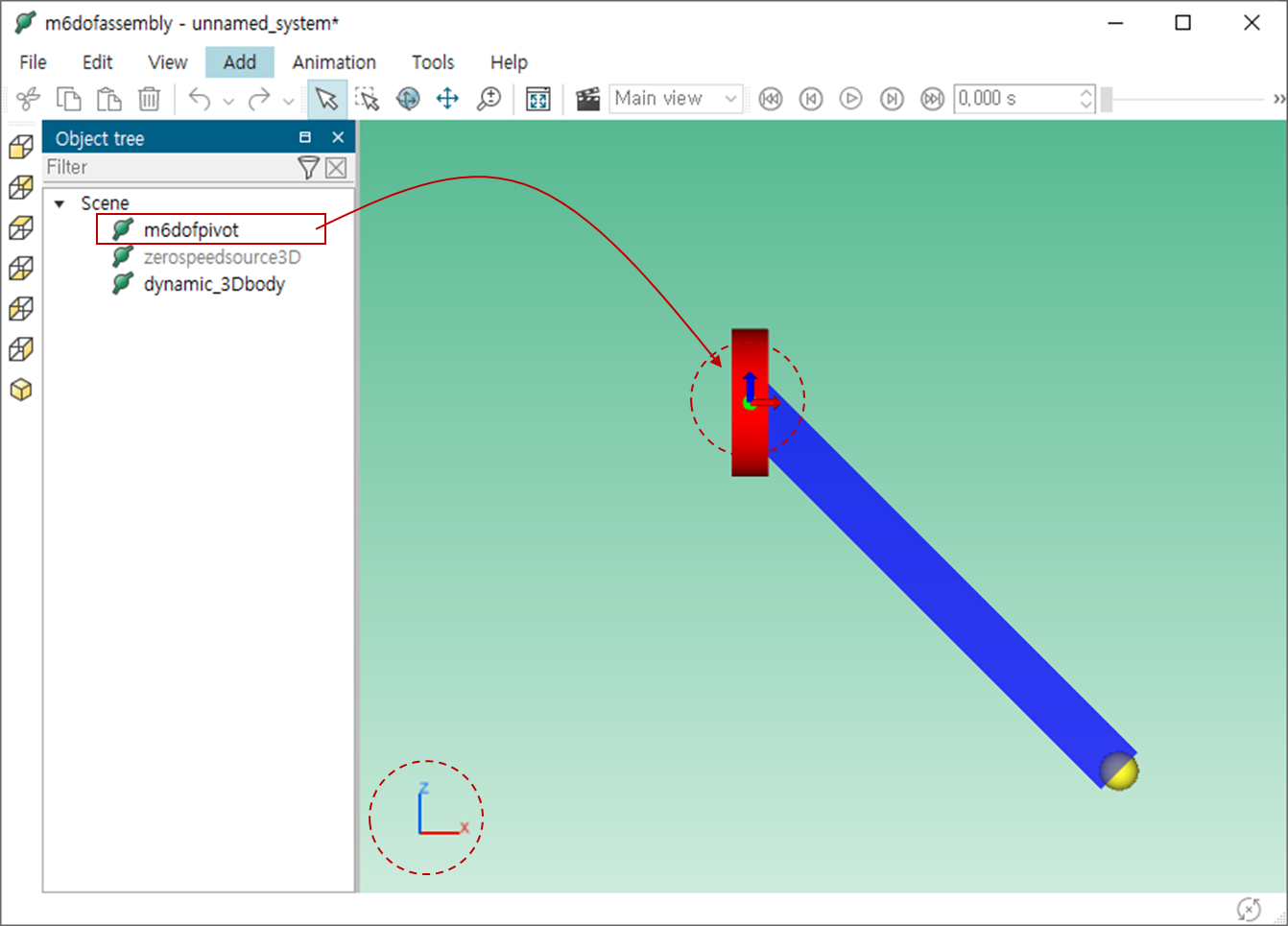
Pivot Junction의 Orientation을 확인하기 위해 테스트 모델을 아래와 같이 정의해 봅시다.
1차 테스트 모델
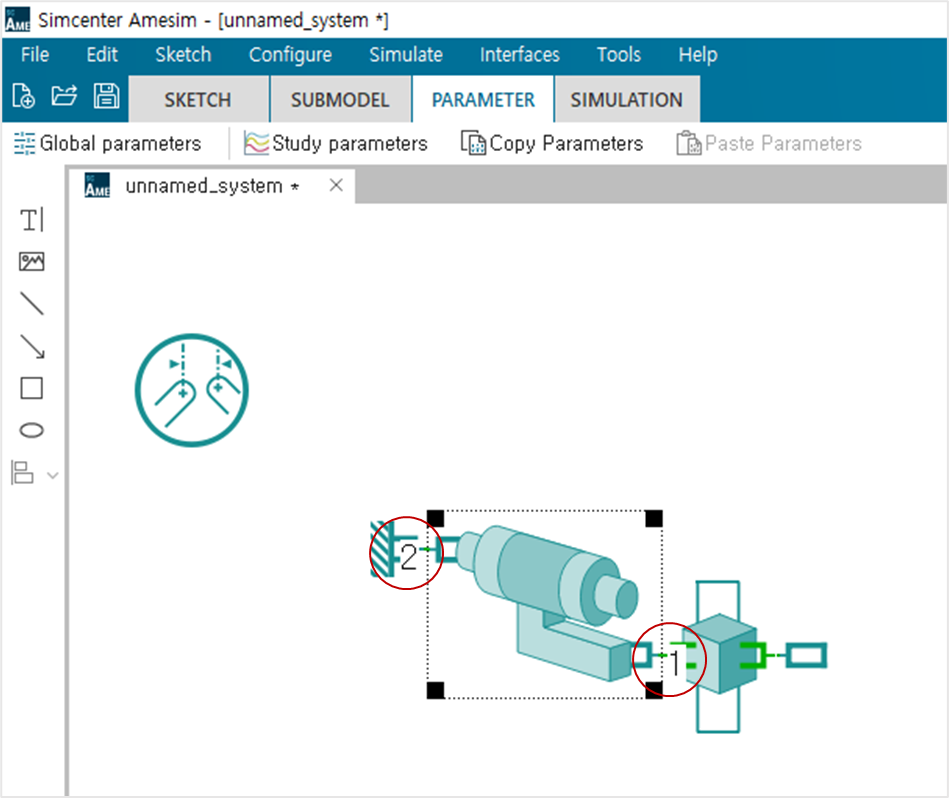
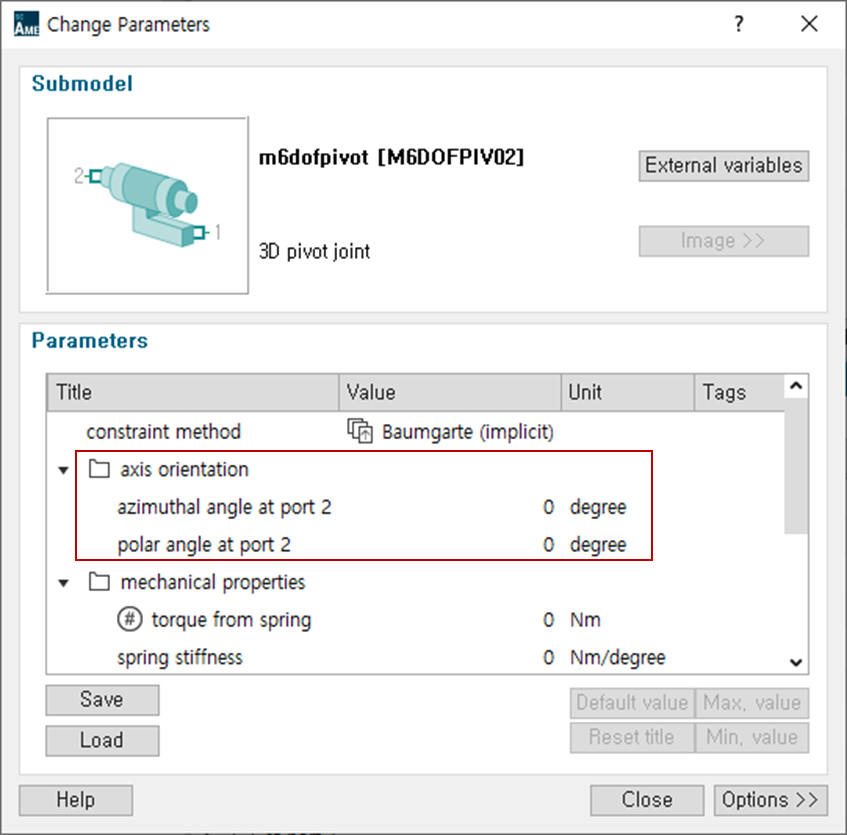
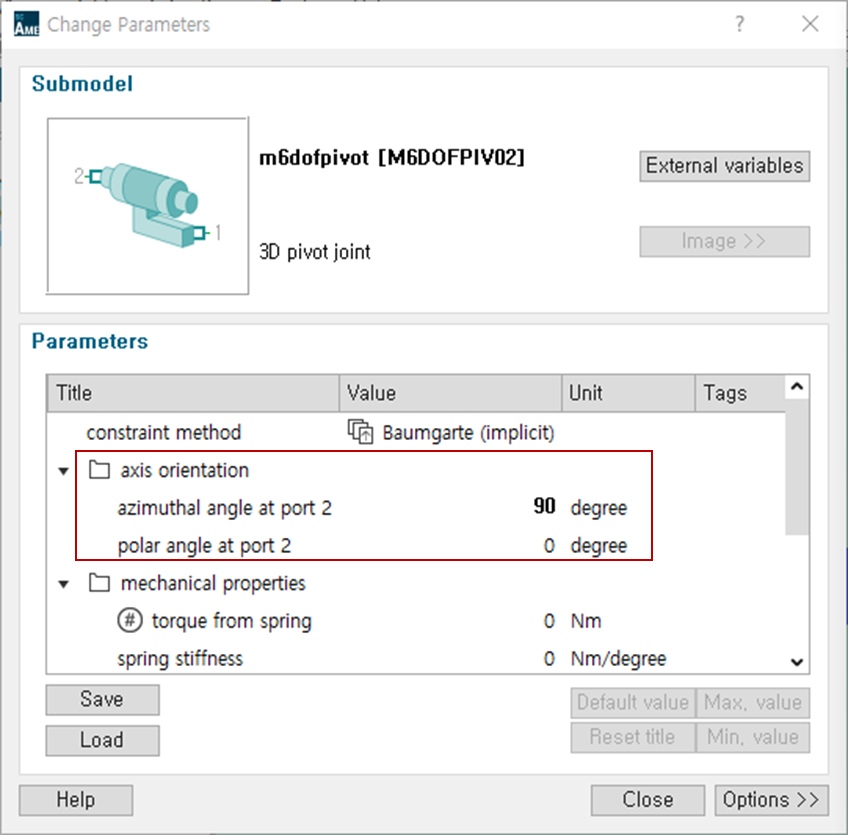
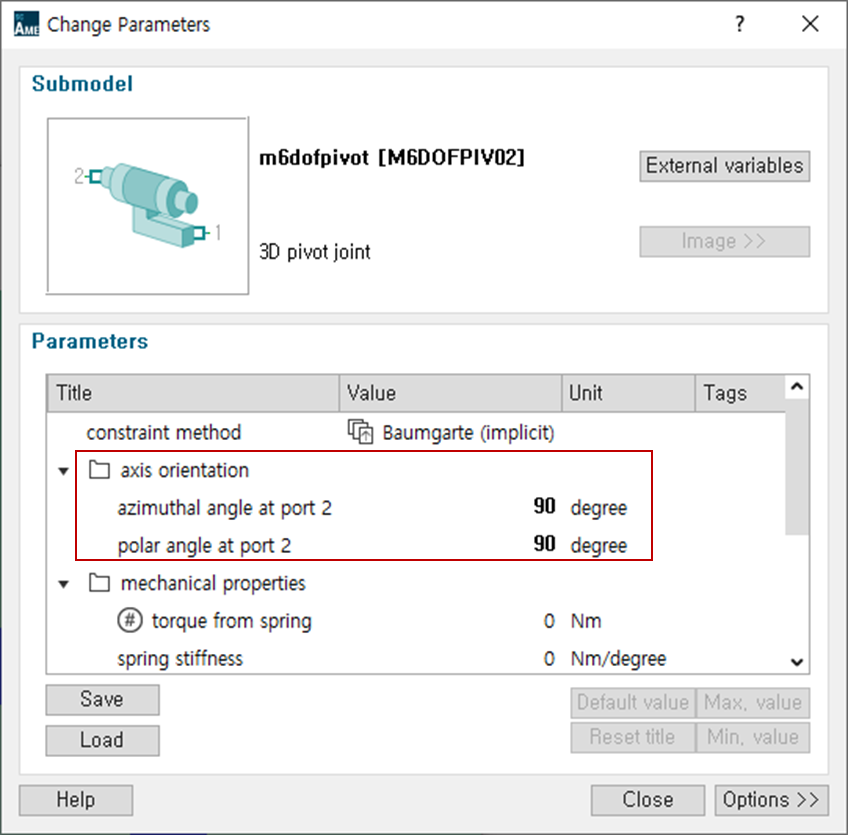
Pivot Junction의 각 입력 파라미터의 의미는 다음과 같습니다.
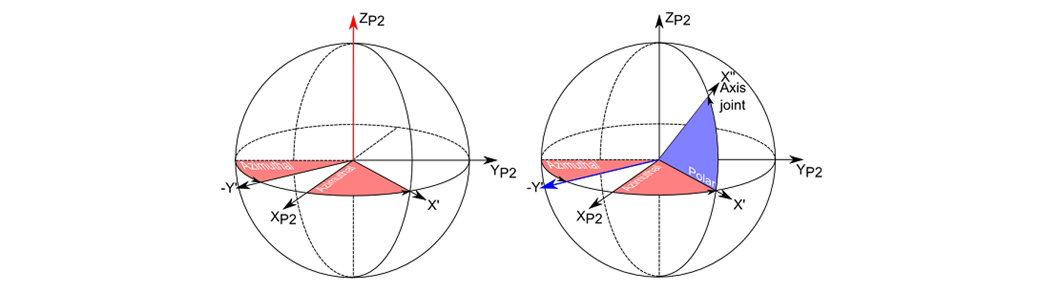
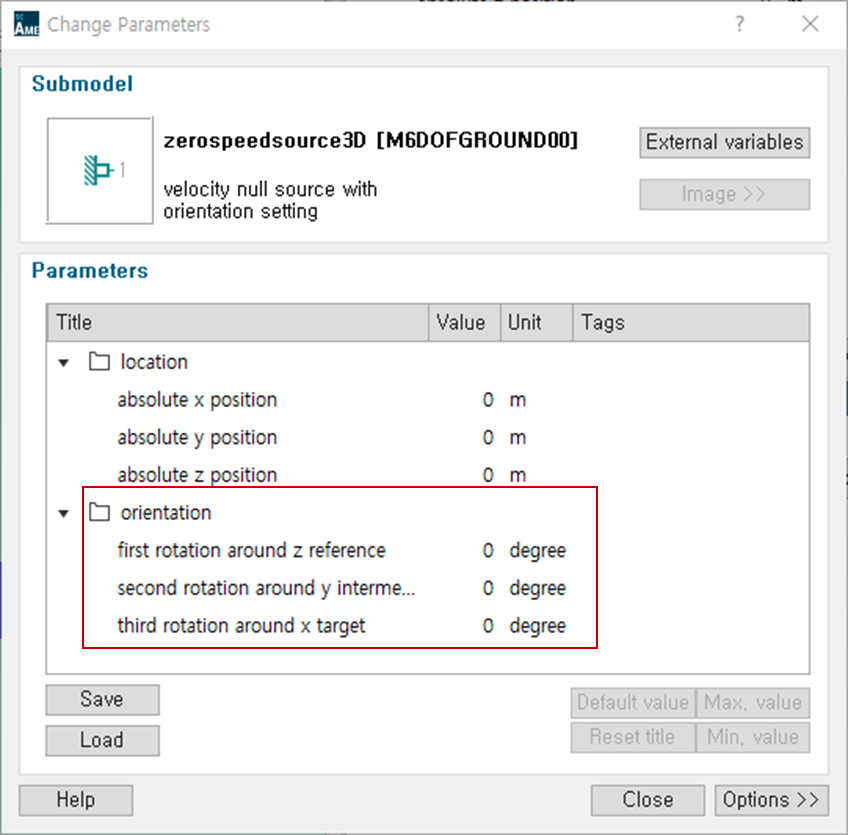
2번 포트의 방위각 : 2번 포트의 기준 좌표계를 기준으로 z축에서 1차 회전한 각도(Zerospped)
포트 2의 극각: z축을 따라 첫 번째 회전된 프레임(x’, y’, z’)의 -y’ 축을 중심으로 회전한 각도
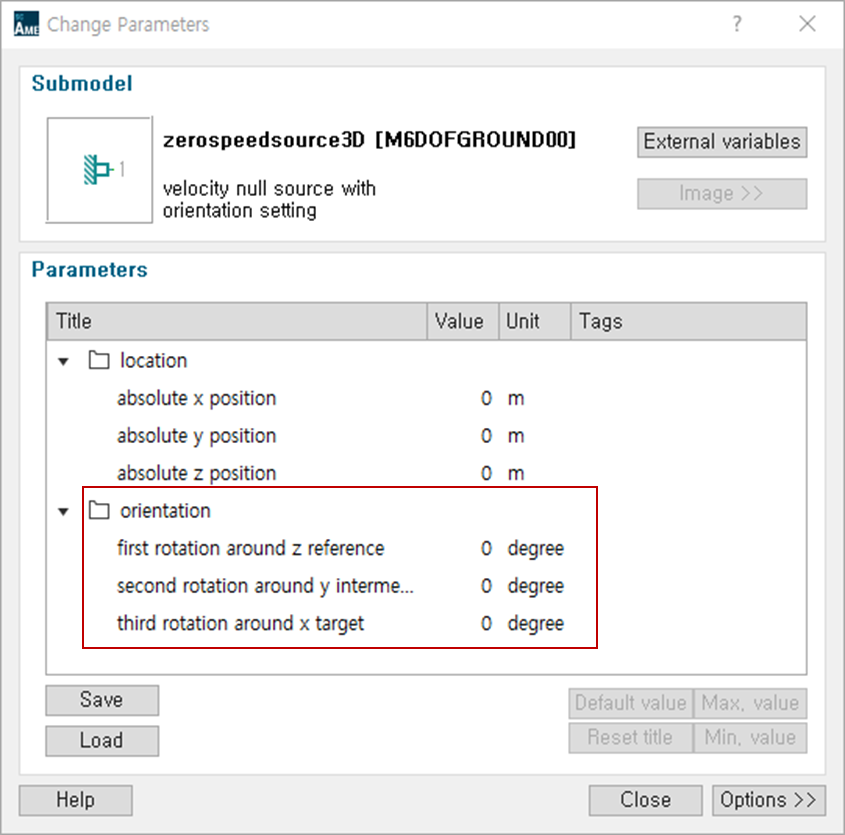
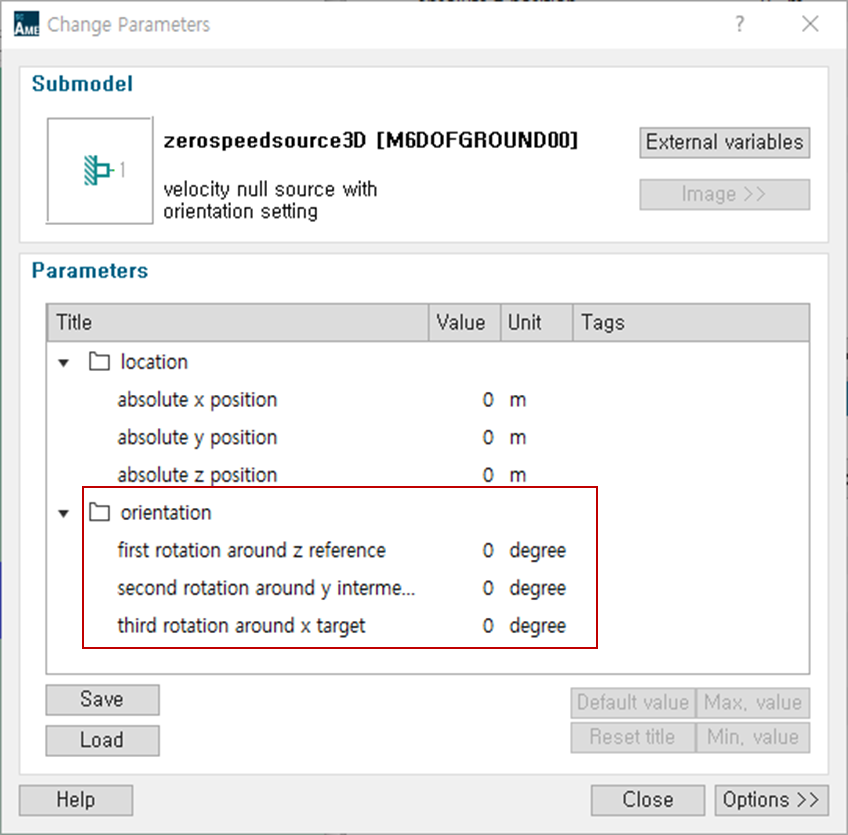
Pivot Junction의 포트 2(Zerospped)의 기준 좌표계는 (0d,0d,0d)로 절대좌표계와 동일하고 회전 변환을 하지 않으므로 Pivot Junction의 Orientation은 절대좌표계와 동일하게 나타납니다. 액자.
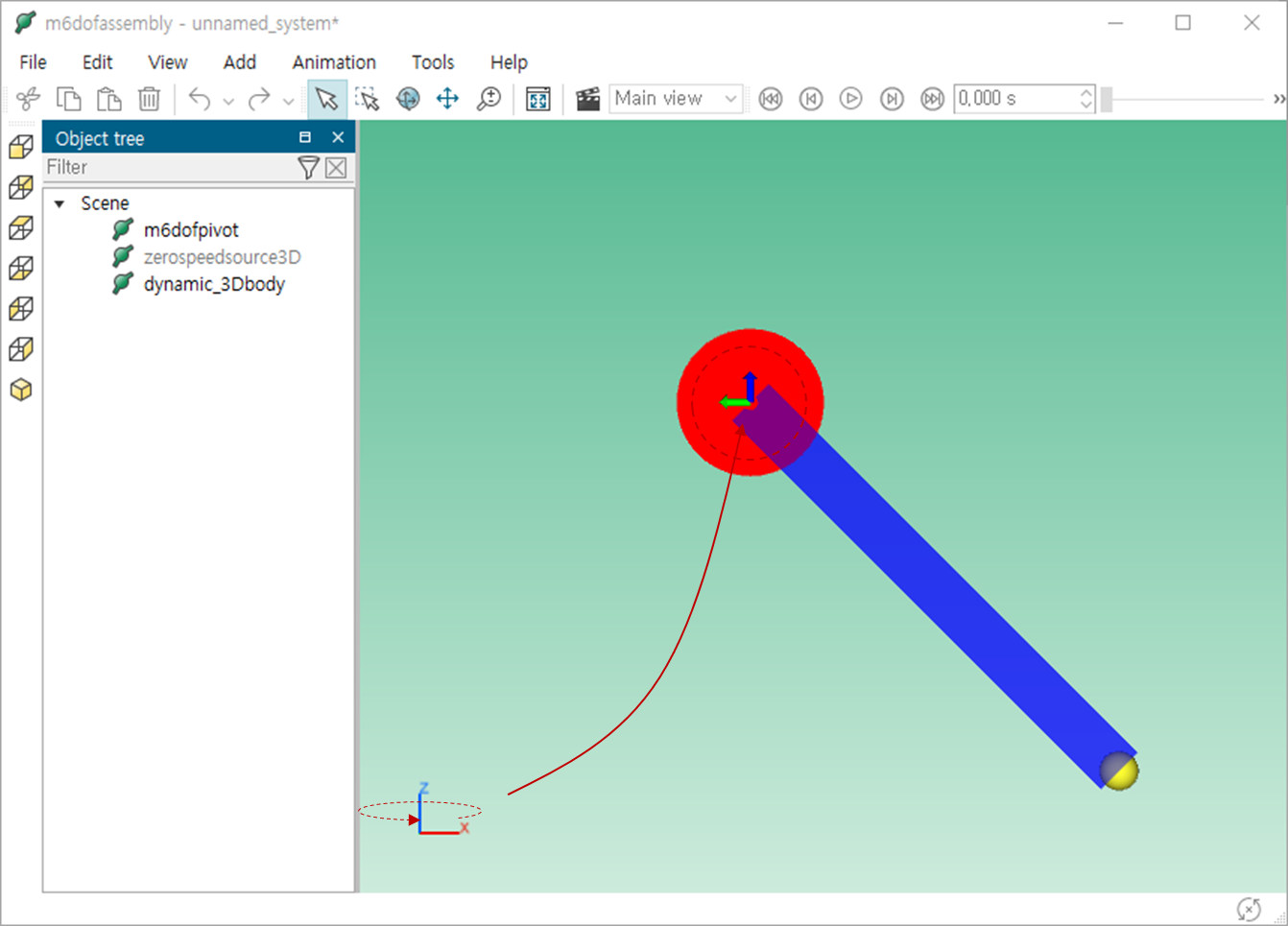
비교를 위해 다음과 같이 보조 테스트 모델을 만듭니다.
Pivot Junction의 방위각을 (90)도로 변경합니다.
비교 모델은 포트 2(Zerospped ) 피벗 접합의. .
비교를 위해 다음과 같이 큐빅 테스트 모델을 만듭니다.
Pivot Junction의 방위각을 (90)도로 변경하고 Ploar 각도를 (90)도로 변경합니다.
최종 비교 모델은 Pivot Junction의 포트 2(Zerospped)의 참조 프레임(0d,0d,0d)(절대 좌표 프레임)의 초기 자세에 있습니다.
(90d)에서 Z 방향(방위각)으로 첫 번째 회전 후
첫 번째 회전된 프레임을 기준으로 -Y 방향(극각)(90d)으로 두 번째 회전한 결과는 아래와 같습니다.
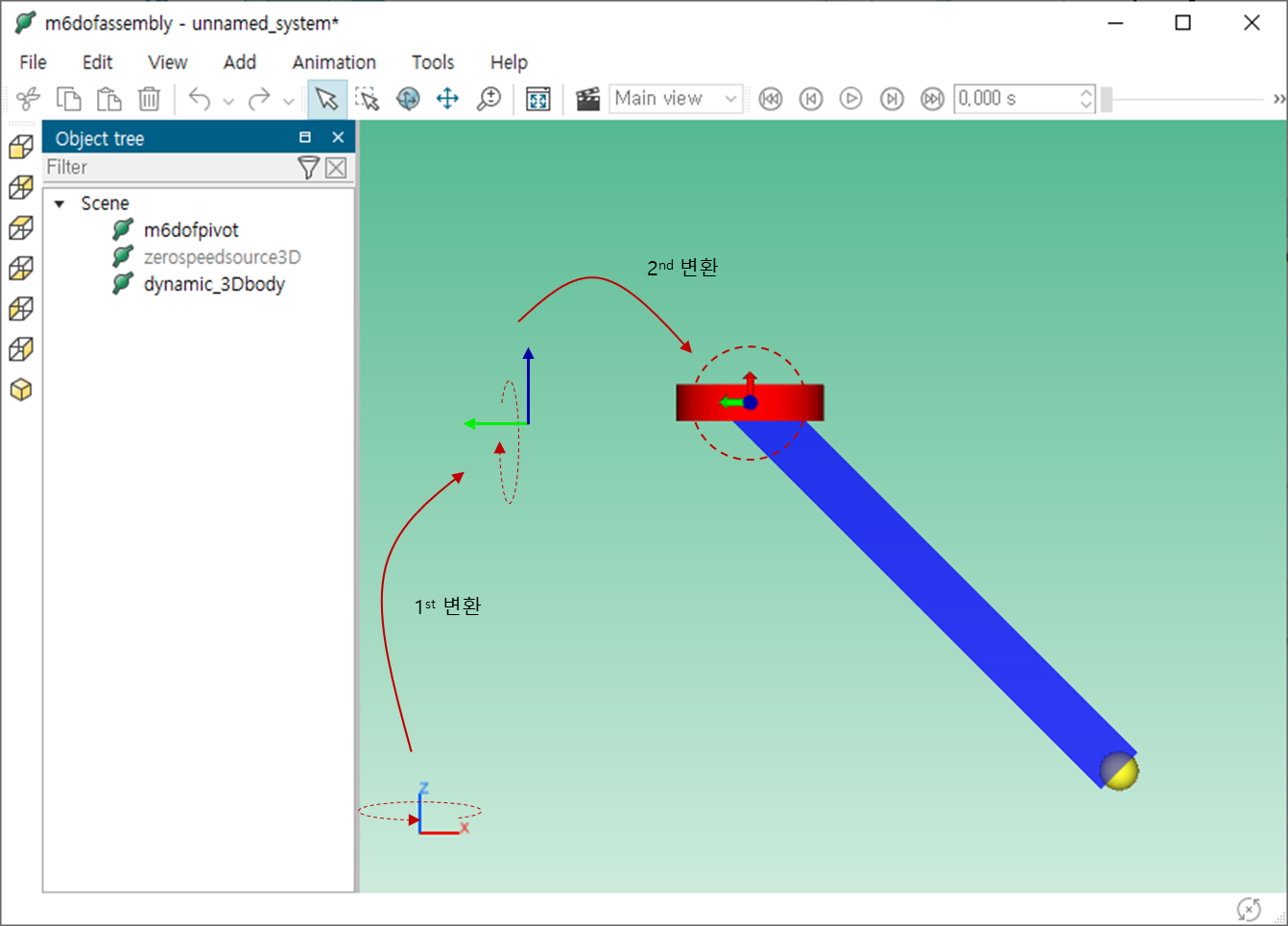
본질적으로 오일러 좌표계에서 각 (Z, Y, X) 회전 순서에 대해 아래 값을 입력하는 것과 같습니다.
Z = 방위각
Y = – 극각
X = 0